
うたしあ(HOME)>手作りロボット工房の部屋
やすらぎ工房「うたしあ」とは
「うれしい」「たのしい」「しあわせ」「ありがとう」 の気持ちで
作品作りをするアートな空間です
手作りロボット工房の部屋にようこそ!
ロボット工作作品
近年、ロボット製作が密かなブームとなっています。しかしながら、高いキットを買えば簡単に出来てしまうのですが、それを1つ1ついろいろな部品で制作することによって機械の駆動や、メカニズムを考えながら制作することが出来ます。幸いにも、このごろでは数々のパーツ店や、工作材料がネットで手に入るので、うたしあのロボ会員の子どもたちと制作をして楽しんでいます。まずは2足歩行を目指しているのですが、様々な知識が必要なので順にいろいろと寄り道をしながら楽しんでいます。
チェブシェフリンク機構を使った
2足歩行ロボット モッグ4号の制作
(岐阜発明工夫展2009 入選)
 |
 |
 |
今回はABS版を使ってパーツを1つ1つ手作りで仕上げていきます。 |
アルミのパーツと、ABSのパーツを組み合わせて左右の足の部分を制作します。このとき足が固くて噛んでいないか、傾いていないか、動きがスムーズかを入念にチェックします |
タミヤのギアセットを取り付けて動かしてみましたがうまくいきません。どうも噛んでいる感じです。ここでねじ穴と0.2ミリ大きくして再度調整。また、ずれる部分をタッピングネジで補強しました。 |
 |
 |
 |
| 走行テスト開始です。うまく行きました。 |
うまく歩くように何回もバラしては組み立てて調整です。 |
同じころに制作した振動ロボとの2ショットです。また、足だけなのでさみしいですが、歩きはいい感じです。 |
 |
 |
 |
頭の部分を制作しました。今回は時間がなくて手は動きませんがコミカルなかわいいロボになりました |
ロボ軍の完成です。 |
完成外観です。なかなかいい仕上がりになりました。MOG4でやっと2足歩行ができました。 |
MOG4は、脚をすりながら,なんとか前へ歩きました。 |
||
クルーラタイプロボとバイブレーションロボの制作(岐阜発明工夫展2008 入選)
 |
 |
 |
タミヤ模型のクルーラキットを使って空き缶回収のロボットを製作しました |
空き缶に、振動モータを取り付けたバイブレーションロボの回収です |
バイブレーションロボの回収はなかなか細かい動きをするので難しいです |
 |
モータシャフトドライブロボの製作 |
|
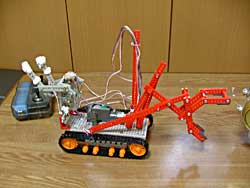
空き缶回収のロボットの反対側にはなぜだかパンチングロボットが取り付けられ、うまく回収でき無いときにはこのパンチロボで相手を制止させます。今回はクランクギアボックスの仕組みやクランクの構造について学習できました。 |
||
モータシャフトドライブロボの制作
(岐阜発明工夫展2006 入選)
筐体はアクリルで制作しました。とめ具は空き缶を利用しています。 |
シャフトドライブの準備です。うまく行くかな。 |
100円ショップで買った弁当箱をコントローラーにしています。中央はon-off-onスイッチです。 |
 |
 |
 |
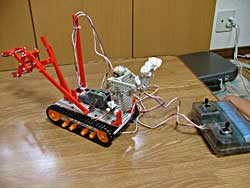
走行テスト開始です。うまく行きました。 |
本体に腕をつけるためクランクギアを取付けます。 |
完成外観その1。腕がうまく動いています。この熊手のような腕でビー玉を集めます。 |
| モータシャフトドライブロボの製作 |
 |
 |
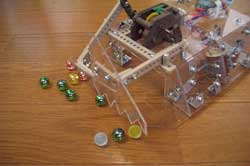
完成外観その2。腕がうまく動いてビー玉を集めています。 |
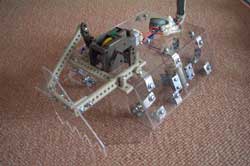
完成外観その3。特殊な足に変えると絨毯上でも動きました。 |
|
モーターシャフトドライブロボはうまく完成しました。簡単な仕組みですが、コントローラの作り方、モーターの取り付け角度など様々なことを学習することが出来ました |
||